Vaizdo įrašų penktadienis – tai jūsų savaitės nuostabių robotikos vaizdo įrašų pasirinkimas, kurį renka jūsų draugai IEEE spektras robotika. Taip pat skelbiame savaitinį ateinančių kelių mėnesių robotikos renginių kalendorių. Prašau atsiųskite mums savo renginius įtraukimui.
IROS 2025: 2025 m. spalio 19–25 d., HANGŽOU, KINIJA
Mėgaukitės šios dienos vaizdo įrašais!
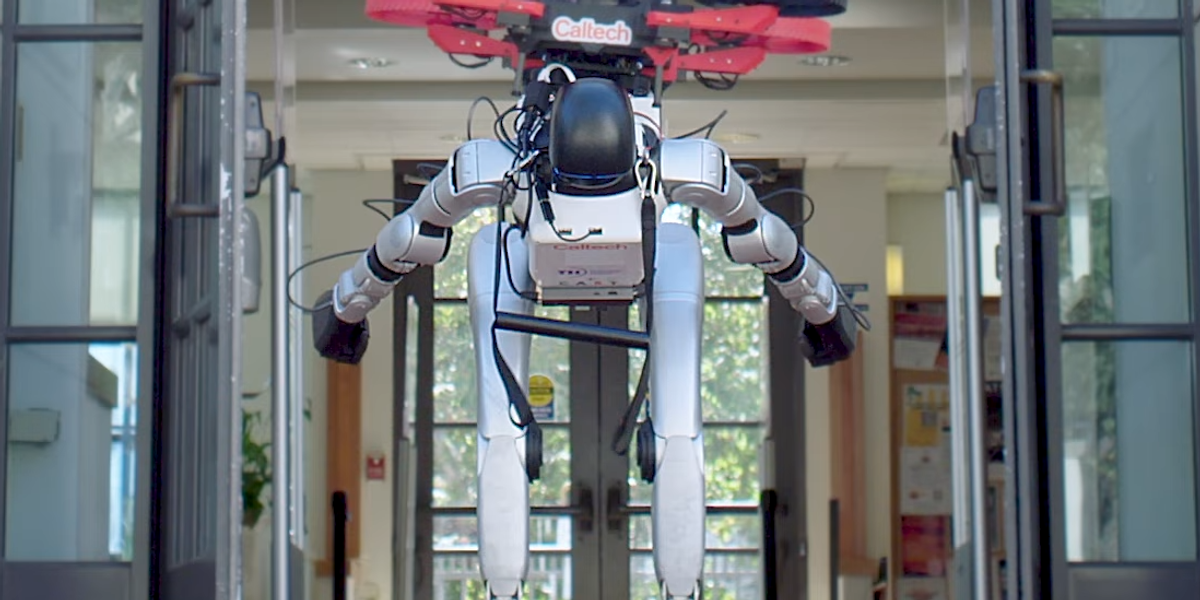
Caltech autonominių sistemų ir technologijų centras (CAST) ir Technologijų inovacijų institutas Abu Dabyje, JAE, neseniai surengė X1 – kelių robotų sistemos, sukurtos trejus metus bendradarbiaujant dviem institutams, demonstravimą. Demonstracinės versijos metu CAST sukurtas multimodalinis robotas M4 paleidžiamas drono režimu iš humanoidinio roboto nugaros. Jis nusileidžia ir persijungia į vairavimo režimą ir, jei reikia, vėl grįžta atgal. Demonstracija pabrėžė, kokia pažanga įmanoma, kai iš tikrųjų bendradarbiauja inžinieriai iš kelių institucijų, kurios yra autonominių sistemų ir technologijų priešakyje.
( Caltech autonominių sistemų ir technologijų centras )
„Spot“ atlieka dinamišką viso kūno manipuliavimą, naudodamas sustiprinimo mokymąsi ir mėginių ėmimu pagrįstą valdymą. Vaizdo įraše rodomas elgesys yra visiškai savarankiškas, įskaitant dinamišką rankos, kojų ir kūno kontaktų pasirinkimą bei manipuliavimo ir judėjimo procesų koordinavimą. Padanga sveria 15 kilogramų (33 svarus), todėl jos masė ir inercijos energija yra reikšmingos, palyginti su roboto svoriu. Suvokimui supaprastinti buvo naudojama išorinė judesio fiksavimo sistema, o išorinis kompiuteris, susietas per Wi-Fi, atliko intensyvias skaičiavimo operacijas.
Spot ranka stipresnė nei maniau. Be to, rankų ir pėdų bendradarbiavimas yra gana laukinis.
( Robotikos ir dirbtinio intelekto institutas )
03 paveiksle pavaizduota precedento neturinti pažanga perkeliant humanoidinius robotus iš eksperimentinių prototipų į dislokuojamus, keičiamo dydžio produktus. Sujungdama pažangų suvokimą ir lytėjimo intelektą su saugiu namuose dizainu ir pasirengimu masinei gamybai, „Figure“ sukūrė platformą, galinčią mokytis, prisitaikyti ir dirbti tiek namų, tiek komercinėse aplinkose. 03 paveikslas, sukurtas Helix, namams ir pasauliui, sudaro tikros bendrosios paskirties robotikos pagrindą, galintį pakeisti žmonių gyvenimą ir darbą.
Vaikas ir šuo tuose klipuose mane labai labai nervina.
( pav. )
Tyrėjai išrado naują itin judrų robotą, kuris gali sumaniai pakeisti formą dėl amorfinių savybių, panašių į populiarųjį Marvel antiherojų Venom. Tyrėjai naudojo specialią medžiagą, vadinamą elektromorfuojančiu geliu (e-MG), kuri leidžia robotams parodyti formą keičiančias funkcijas, leidžiančias jiems sulenkti, ištempti ir judėti tokiais būdais, kurie anksčiau buvo sudėtingi arba neįmanomi, manipuliuojant elektriniais laukais iš itin lengvų elektrodų.
(Bristolio universitetas)
Žinoma, tai labai preliminari, bet man patinka idėja, kad keturkojai robotai fiziškai padeda vienas kitam įveikti tokias kliūtis kaip ši.
( Roboto suvokimo ir mokymosi laboratorija )
Ar jau pasiekėme dinamiško humanoido piką?
( Vienetinis medis )
Dinaminės manipuliacijos, tokios kaip robotai, mėtantys ar mėtantys daiktus, pastaruoju metu sulaukė dėmesio kaip nauja paradigma, skirta paspartinti logistikos operacijas. Tačiau daugiausia dėmesio buvo skiriama objekto nusileidimo vietai, neatsižvelgiant į jo galutinę orientaciją. Šiame darbe pristatome metodą, leidžiantį robotui tiksliai „išmesti ir apversti“ objektus į norimą nusileidimo pozą (poziciją ir orientaciją).
(LASA)
Man visai nerūpi „į pramonę orientuoti“ keturkojai. Man labai rūpi „jojami“ keturkojai.
(„MagicLab“)
Dar nesu tokia, kad pasitikėčiau jokiu žmogeliuku, turinčiu neįkainojamų senovės relikvijų. Bet koks humanoidas, ne tik robotas.
(LimX)
Šį Carnegie Mellon universiteto RI seminarą „Manipuliavimo kelionė“ pristato Mattas Masonas, CMU profesorius emeritas.
Pokalbyje dar kartą apžvelgsiu mano karjerą manipuliavimo tyrimų srityje, sutelkiant dėmesį į projektus, kurie gali pasiūlyti naudingų pamokų kitiems. Pradėsime nuo mano pradžios MIT AI laboratorijoje ir mano MS disertacijos, kuri vis dar yra mano dažniausiai cituojamas darbas, tada tęsime mano atvykimu į CMU, diskusiją su Allenu Newellu, pratimu nuosekliai mokslinių tyrimų programai įsivaizduoti ir kaip tai atvedė į antrą ir trečią vaikystę. Pokalbis baigsis išmoktų pamokų aptarimu.
( Carnegie Mellon universiteto Robotikos institutas )
Christianas Hubickis pabrėžia ir paaiškina praėjusius humanoidinių robotų tyrimų metus ir naujienas.
(Floridos valstijos universitetas)
Daugiau puikių robotikos diskusijų iš ICRA@40.
( ICRA@40 )
Iš jūsų svetainės straipsnių
Susiję straipsniai visame internete
Nuoroda į informacijos šaltinį